- convert model to tensorrt verson and detect object with Ros topics
- Based on wangguojun2018/PointPillars_Tensorrt
-
ONLY support python 3.6+, pytorch 1.3.0+. Tested in Ubuntu 16.04.
-
Suppose you have installed the arm64 version of
Pytorch_1.3.0+, TensorRt, CUDA, CuDNNon your Xavier device
git clone https://github.com/hova88/Lidardet.gitpip3 install numba pyntcloud pyyaml rospkg pyquaternion protobuf- Ros-numpy:
git clone https://github.com/eric-wieser/ros_numpy
cd ros_numpy && python setup.py install- if
LLVM_CONFIGnot found, as below:
sudo apt-get install llvm-8
export LLVM_CONFIG=/usr/bin/llvm-config-8
pip3 install numba- if
No lapack/blas resources found, as below:
apt-get install gfortran libopenblas-dev liblapack-dev
pip3 install scipy- if
can not find CUDNN:
sudo ln -s libcudnn.so.7 libcudnn.so- Follow instructions in torch2trt to install torch2trt
apt install ros-melodic-rospy ros-melodic-ros-base ros-melodic-sensor-msgs ros-melodic-jsk-recognition-msgs ros-melodic-visualization-msgsyou need to add following environment variable for numba.cuda, you can add them to ~/.bashrc:
export NUMBAPRO_CUDA_DRIVER=/usr/lib/aarch64-linux-gnu/libcuda.so
export NUMBAPRO_NVVM=/usr/local/cuda/nvvm/lib64/libnvvm.so
export NUMBAPRO_LIBDEVICE=/usr/local/cuda/nvvm/libdevice- Generating tensorrt model script
cd ./Lidardet
python3 libs/tools/convert2rt.py convert --config_path=./params/configs/pointpillars_kitti_car_xy16.yaml --weights_file=./params/weights/path/to/your.ckpt --trt_path=/home/hova/Lidardet/params/TensorRT/XXX- Inference
python script.py --weights_file=/home/hova/Lidardet/params/weights/pointpillars/PointPillars.tckpt --config_path=/home/hova/Lidardet/params/configs/pointpillars_kitti_car_xy16.yaml --trt_dir=/home/hova/Lidardet/params/TensorRT/XXX
- rviz view
rviz
- Kitti lidar box
A kitti lidar box is consist of 7 elements: [x, y, z, w, l, h, rz], see figure.
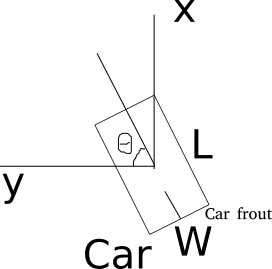
All training and inference code use kitti box format. So we need to convert other format to KITTI format before training.
- Kitti camera box
A kitti camera box is consist of 7 elements: [x, y, z, l, h, w, ry].