TFs in UAL
As many other ROS application we also publish TFs. We assume that UAL is the interface with the robot (aerial robot in this case) so it is UAL which publishes odom and base_link TFs.
odom is a static TF referred to map frame, and it this transform can be defined as a param home_pose (<rosparam param="home_pose">[0, 0, 0]</rosparam><!-- [x,y,z] -->).
base_link is the frame attached to the UAV body, and it is referred to the odom frame.
As UAL is ready to be used in several robots at the same time, these frames are automatically adapted to the corresponding namespace. In the example provided in test_server.launch with the arg multi=true, it runs 3 UAVs with namespaces uav_1, uav_2 and uav_3. Thus, the published frames are uav_1/odom, uav_1/base_link, etc.
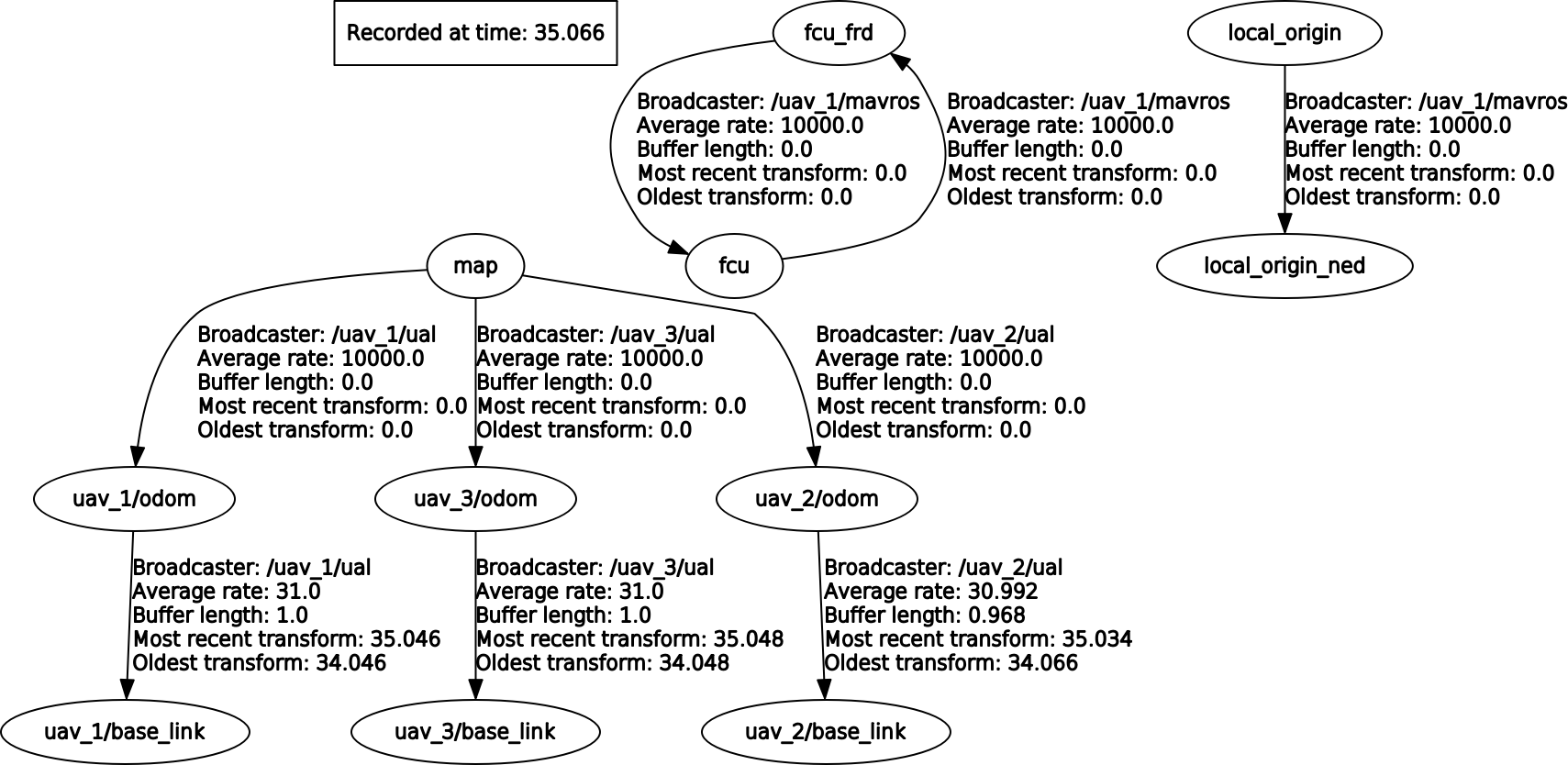
The following figure shows the result of running rqt_tf_tree with the simulation of 3 UAVs using test_server.launch. The frames fcu, fcu_frd, local_origin, and local_origin_ned are generated by mavros node and they are not to be used.